.jpg)
Rohan Pavuluri
Hi, I'm Rohan, a rising senior from Westlake High School, passionate about implementing Computer Science, Biomedical Engineering, Math, and AI/ML in the healthcare industry. In my free time, I enjoy solving computational problems, mentoring others, and volunteering in the community. I have over six years of consistent participation and success in national-level mathematics competitions, proving my love for problem-solving. My passion extends to the practical application of these fields, as demonstrated in my published research papers and mobile applications, which benefit people. But what truly motivates me is my deep commitment to humanitarian issues. I am dedicated to providing health and educational resources to the underprivileged, a cause I believe we can all contribute to. Based on that philosophy, I have created a global nonprofit organization, Open Minds Open Doors (OMSODS), and developed the first mobile app, SteadyPD, which performs motor testing with actionable early detection for patients with Parkinson's disease. In the future, I aspire to innovate transformative technologies that will make global healthcare more accessible and affordable for everyone.
My Journey
Current Projects

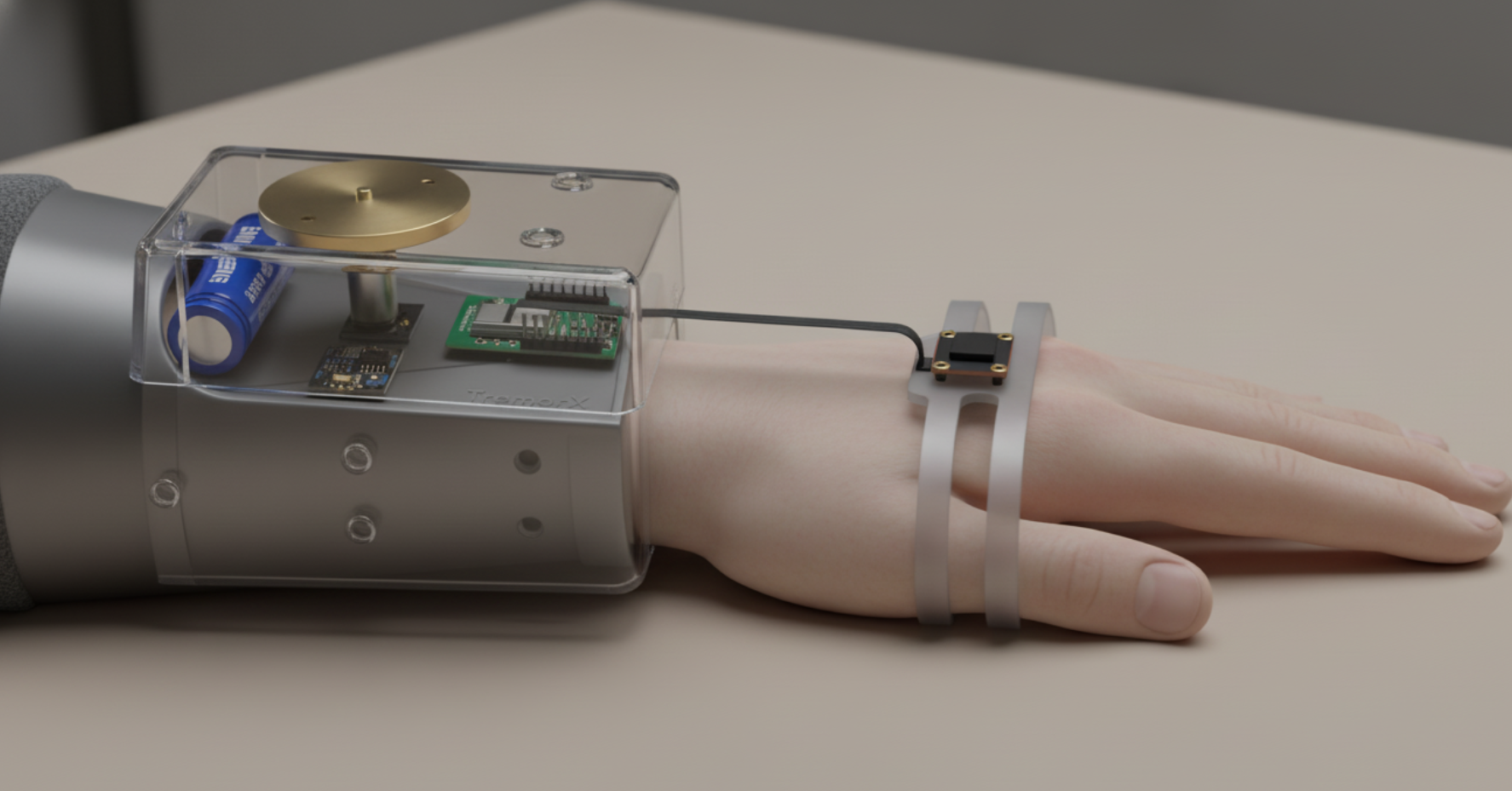
TremorX: Wearable Reaction-Wheel Tremor Stabilization Brace
A lightweight, active mechanical stabilization biomedical device designed to assist individuals with neurological movement disorders.
Project Overview
This project proposes the development of a lightweight wearable wrist brace designed to suppress hand tremors through active mechanical stabilization. The device is intended to assist individuals suffering from Parkinson's disease and Essential tremor.
The brace detects tremor motion in real time using inertial sensors and generates counteracting torque through a high-speed reaction wheel. By dynamically stabilizing the wrist, the system reduces tremor amplitude while still allowing voluntary movement.
Unlike rigid orthotic supports, this design provides a compact, low-cost, and scalable wearable solution suitable for daily use.
System Design & Mechanical Structure
The device consists of motion sensing, control processing, and active mechanical stabilization, divided into three structural sections.
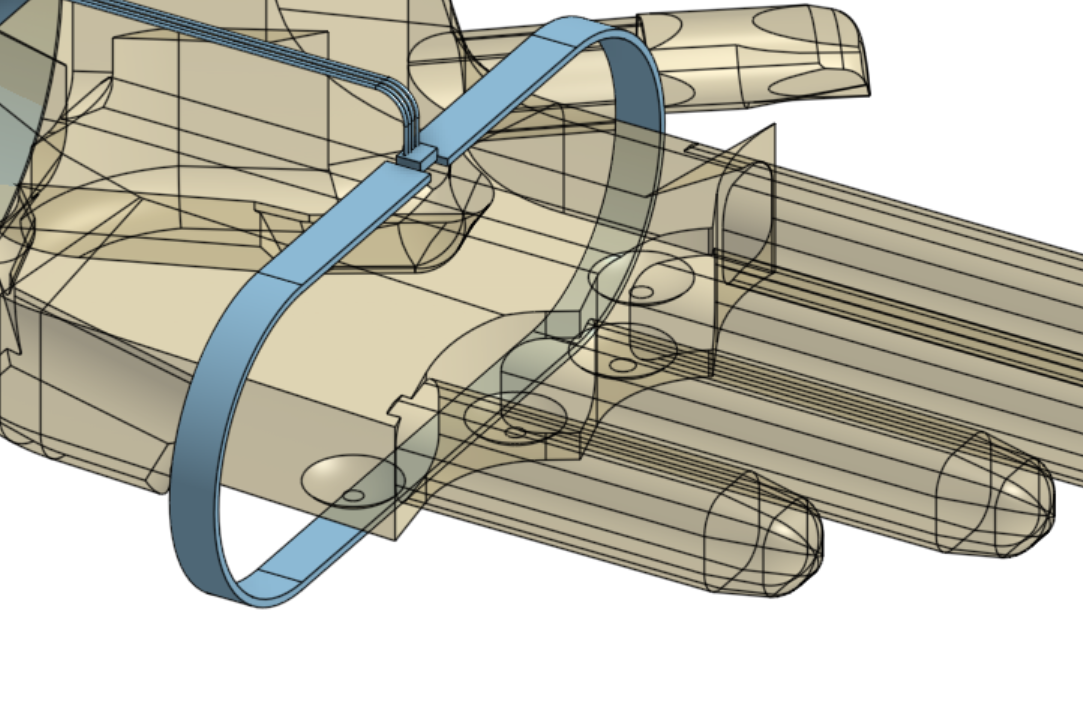
1. Hand Section
A lightweight support wraps around the palm and dorsal side of the hand. Mounted on this section is an inertial measurement unit (IMU) that detects precise motion and frequency of the hand.
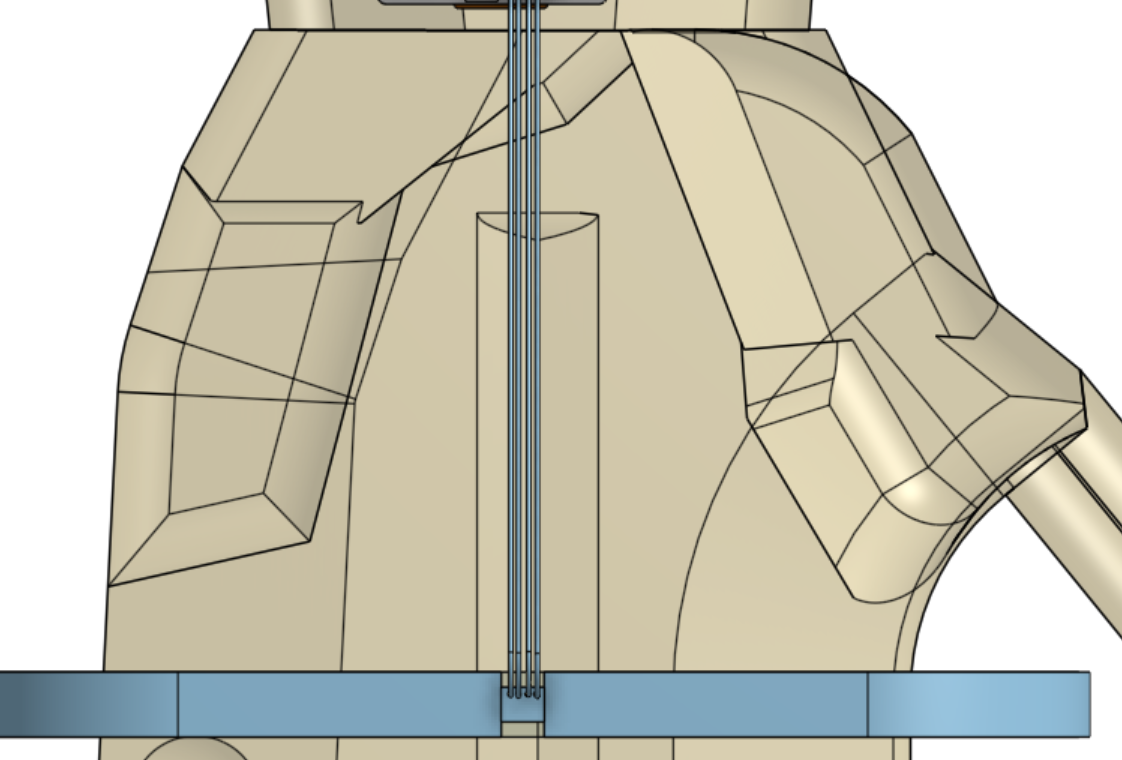
2. Wrist Flex Region
The wrist joint area remains mostly open to preserve natural wrist mobility. A flexible cable channel routes sensor wires seamlessly from the hand up to the forearm electronics housing.
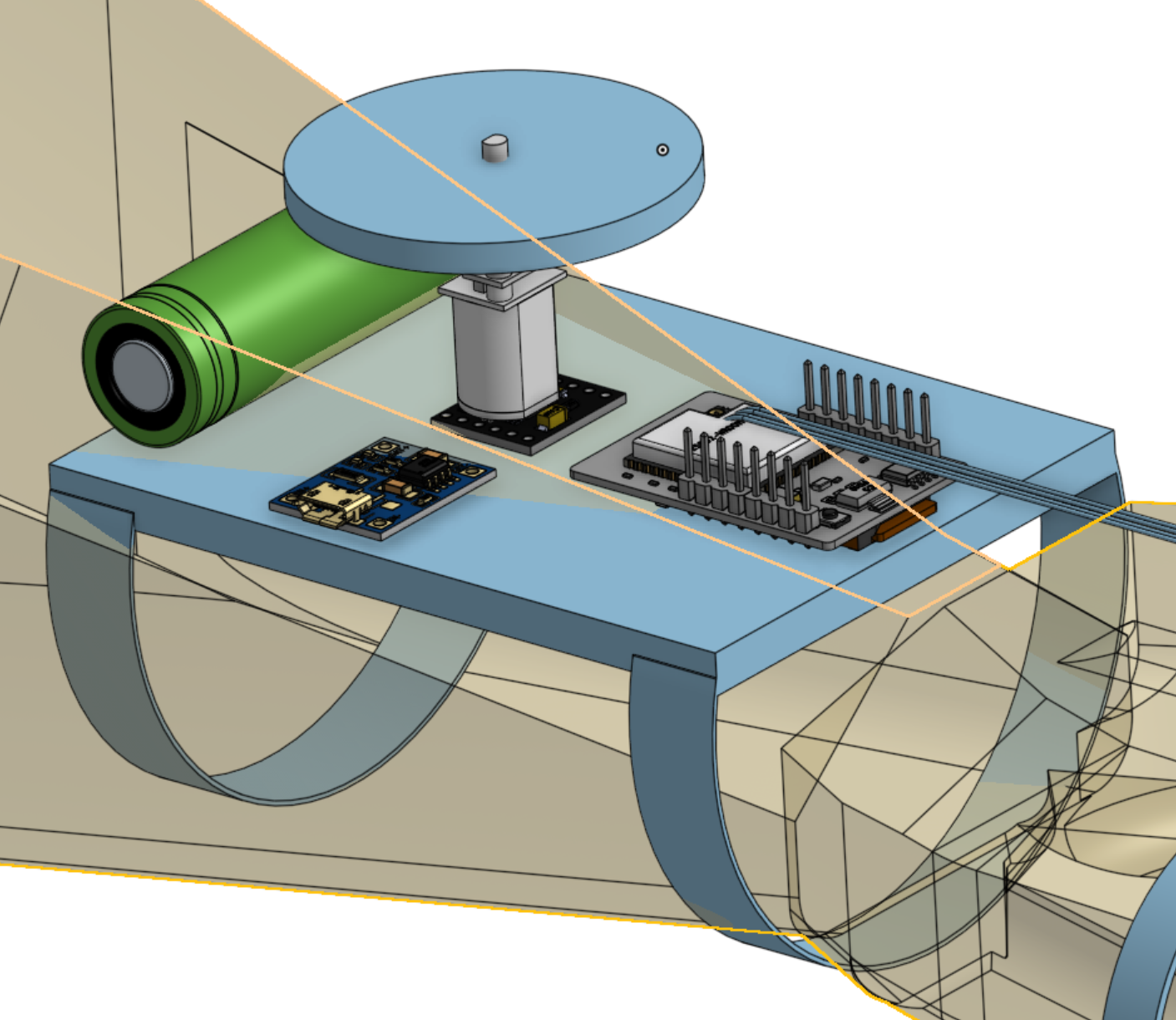
3. Forearm Module
Contains the main electronics and the reaction wheel assembly responsible for stabilization. Placing heavier components on the forearm reduces hand load and improves overall comfort and balance.
Motion Sensing & Control System
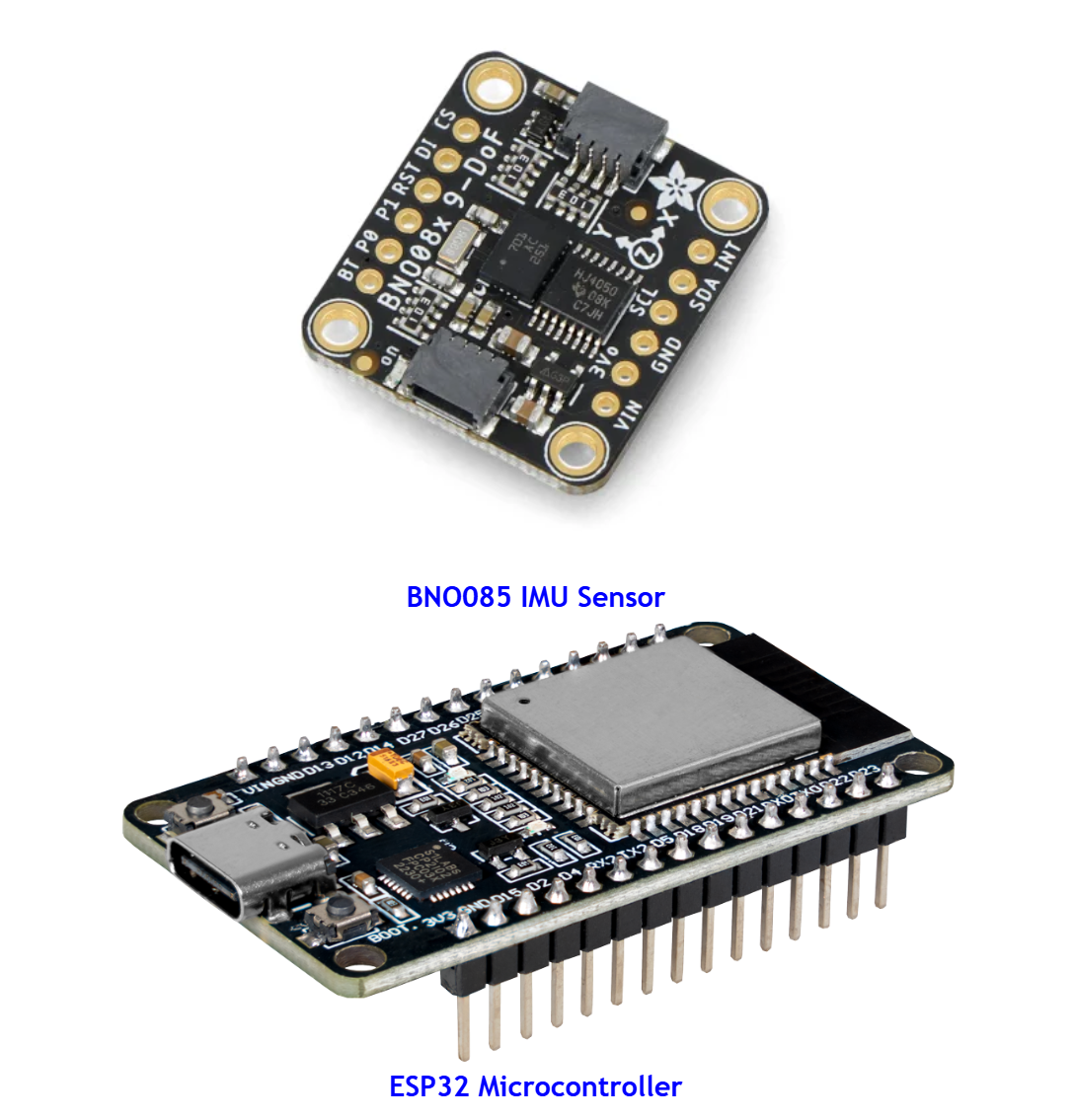
The system detects tremors (typically 4–12 Hz) using a high-performance BNO085 IMU Sensor, which integrates a 3-axis accelerometer, a 3-axis gyroscope, and sensor fusion algorithms.
Data is transmitted via I²C to the onboard ESP32 Microcontroller. The ESP32 handles:
- Real-time tremor detection & signal filtering
- Control signal generation for the motor
- Potential Bluetooth wireless communication for mobile app integration
Reaction Wheel Stabilization & Power
The device suppresses motion using the principle of angular momentum. A high-speed N20 Micro Metal Gear Motor spins a 50mm, 80-100g brass flywheel. A DRV8833 Motor Driver receives PWM signals from the ESP32 to regulate power.
The system is powered by a rechargeable Samsung 30Q 18650 Lithium-Ion Battery, managed by a TP4056 Charging Module, yielding an estimated 6–8 hours of active runtime.
Control Architecture
- 1. Detection: IMU measures hand motion and rotational velocity.
- 2. Analysis: ESP32 analyzes tremor frequency and amplitude.
- 3. Calculation: Control algorithm calculates the necessary counter-torque.
- 4. Actuation: Motor driver adjusts reaction wheel speed.
- 5. Stabilization: Generated torque counteracts involuntary oscillations.
Manufacturing & Scalability
The brace structure can be manufactured using lightweight polymers through 3D printing, with potential for injection molding for mass production. Electronics are widely available and low-cost, allowing highly scalable production.
- IMU Sensor: $15–$25
- Microcontroller: $5–$10
- Motor & Driver: $10–$20
- Battery & Charging: $10–$15
- Brace Structure: $10–$20
Potential Global Impact
Approximately 10 million people worldwide live with Parkinson's disease and over 40 million people experience essential tremor. Many existing treatments rely on heavy medication or highly invasive procedures like deep brain stimulation.
By combining modern wearable electronics, embedded systems, and mechanical stabilization, TremorX aims to deliver a compact, affordable, and non-invasive assistive technology that significantly improves independence and quality of life for digitally and medically underserved populations.